
„
Die Innovation von CONTROL: Unsicherheiten im gesamten System früh erkennen, bewerten und aktiv beherrschen. So reagiert das Fahrzeug adaptiv – durch Tempoanpassung oder Ausweichen – und bleibt in komplexen Umgebungen sicher. CONTROL ergänzt bewährte Ansätze um skalierbare Metriken, digitale Zwillinge und Unsicherheitsmodelle, erprobt in Simulation, Prüfstand und realen Demonstratoren – ein Kernbaustein für das softwaredefinierte Fahrzeug (SDV).
Marc Zeller
Siemens Mobility GmbH
Forschungsansatz
Unsicherheiten erkennen, bewerten und beherrschen.
CONTROL schafft die Grundlage für sicheres hochautomatisiertes Fahren in der offenen Welt.
► Die Vielfalt und Dynamik offener Umgebungen überfordert klassische Absicherungsmethoden. CONTROL geht deshalb einen neuen Weg: Das System bewertet kontinuierlich, wie sicher es in einer Situation operieren kann, und reagiert bei Unsicherheiten mit vorsichtigen Maßnahmen, etwa durch angepasste Geschwindigkeit oder kontrolliertes Ausweichen.
► CONTROL baut auf den Projekten PEGASUS und VVMethoden auf, die systematisch Testfälle abgeleitet und komplexe Betriebsbereiche abgesichert haben. Als Teil der VDA Leitinitiative autonomes und vernetztes Fahren erweitert CONTROL diesen Pfad um die Fähigkeit, Unsicherheiten aktiv zu bewerten und zu bewältigen.
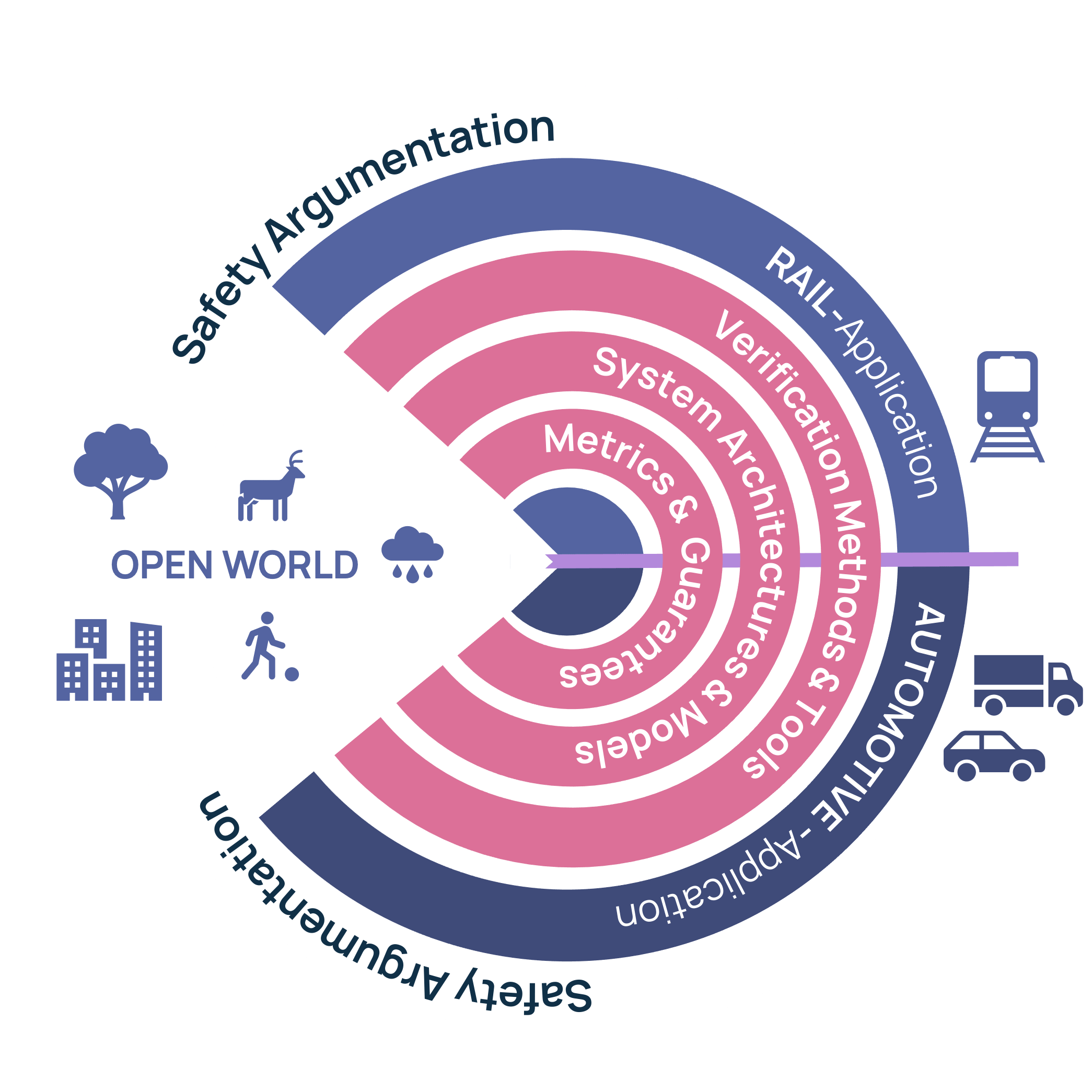
► Statt einzelne Komponenten isoliert zu betrachten, wird das hochautomatisierte Fahrzeug als Gesamtsystem verstanden, inklusive adaptiver Verfahren zur Bewertung von Unsicherheiten in der Entwicklungs- und Laufzeit. Ein zentrales Element ist die Entwicklung einer branchenübergreifenden Sicherheitsargumentation, die Unsicherheiten systematisch erfasst, bewertet und in die Architektur hochautomatisierter Systeme integriert.
► CONTROL wird ein Kernbaustein für das softwaredefinierte Fahrzeug (SDV) sein und schafft die Grundlage für schnellere Entwicklungen, Updates und eine höhere Innovationsgeschwindigkeit. Die entwickelten Metriken, Modelle und Werkzeuge sind skalierbar, domänenübergreifend und industriell umsetzbar, mit direkter Relevanz für Straße, Schiene und darüber hinaus.
CONTROL schafft Vertrauen
Unsicherheiten erkennen, bewerten und beherrschen.
CONTROL schafft die Grundlage für sicheres hochautomatisiertes Fahren in der offenen Welt.
► Die Vielfalt und Dynamik offener Umgebungen überfordert klassische Absicherungsmethoden. CONTROL geht deshalb einen neuen Weg: Das System bewertet kontinuierlich, wie sicher es in einer Situation operieren kann, und reagiert bei Unsicherheiten mit vorsichtigen Maßnahmen, etwa durch angepasste Geschwindigkeit oder kontrolliertes Ausweichen.
► CONTROL baut auf den Projekten PEGASUS und VVMethoden auf, die systematisch Testfälle abgeleitet und komplexe Betriebsbereiche abgesichert haben. Als Teil der VDA Leitinitiative autonomes und vernetztes Fahren erweitert CONTROL diesen Pfad um die Fähigkeit, Unsicherheiten aktiv zu bewerten und zu bewältigen.
► Statt einzelne Komponenten isoliert zu betrachten, wird das hochautomatisierte Fahrzeug als Gesamtsystem verstanden, inklusive adaptiver Verfahren zur Bewertung von Unsicherheiten in der Entwicklungs- und Laufzeit. Ein zentrales Element ist die Entwicklung einer branchenübergreifenden Sicherheitsargumentation, die Unsicherheiten systematisch erfasst, bewertet und in die Architektur hochautomatisierter Systeme integriert.
► CONTROL wird ein Kernbaustein für das softwaredefinierte Fahrzeug (SDV) sein und schafft die Grundlage für schnellere Entwicklungen, Updates und eine höhere Innovationsgeschwindigkeit. Die entwickelten Metriken, Modelle und Werkzeuge sind skalierbar, domänenübergreifend und industriell umsetzbar, mit direkter Relevanz für Straße, Schiene und darüber hinaus.
Zwei Domänen – ein Thema
Durchgängige Metriken und Testwerkzeuge
Projektkontext
CONTROL ist ein Projekt der VDA Leitinitiative autonomes und vernetztes Fahren. Das Projekt baut auf den methodischen Arbeiten im Automotive- und Bahnbereich auf, insbesondere den Projekten VVMethoden und SetLevel der PEGASUS-Projektfamilie, sowie dem Projekt safe.trAIn. Unter der Leitung von SafeTRANS ist durch breite Beteiligung von Industrie und Wissenschaft ein White Paper entstanden, dass wichtige Vorarbeiten zu CONTROL geleistet hat. CONTROL wird vom Bundesministerium für Wirtschaft und Energie gefördert.