Controlling Risk for Highly Automated Transportation Systems Operating in Complex Open Environments
Controlling Risk for Highly Automated Transportation Systems Operating in Complex Open Environments
CONTROL schafft Vertrauen in autonome Systeme auf Straße und Schiene.
Qualität sichern, Mobilitätssysteme verstehen. Erfahren Sie, wie das Forschungsprojekt Unsicherheiten beherrschbar macht und Innovationen im Mobilitätssektor domänenübergreifend und zukunftsweisend beschleunigt.
Autonome Systeme im Verkehr müssen in offenen, dynamischen Umgebungen auf eine Vielzahl möglicher Situationen sicher reagieren können, auch auf seltene und unvorhersehbare Ereignisse. Bisherige Verfahren stoßen gerade in komplexen, wenig berechenbaren Betriebsbereichen an ihre Grenzen.
Das Forschungsprojekt CONTROL adressiert diese Herausforderung für den Automobil-, Nutzfahrzeug- und Schienenbereich.
Auf der Straße stehen Situationen wie plötzlich auftauchende Fußgänger an unübersichtlichen Stellen, unerwartete Baustellen, fehlerhafte oder widersprüchliche Verkehrssignale, extreme Wetterlagen mit Sensorbeeinträchtigung oder technische Störungen im Fahrzeug im Vordergrund. Diese Szenarien sind aktuell kaum systematisch abgesichert. Im Bahnbereich kommen weitere Herausforderungen hinzu, zum Beispiel Personen oder Hindernisse auf dem Gleis.
Autonome Systeme müssen solche sicherheitskritischen Situationen zuverlässig erkennen und bewerten. CONTROL entwickelt dafür einen branchenübergreifenden, systemischen Ansatz. Das Projekt fokussiert auf das autonome Fahrzeug in Form von Pkw, Lkw, Bus und Bahn als Gesamtsystem zur Bewertung und Beherrschung von Unsicherheiten.
Forschungsansatz
Unsicherheiten erkennen, bewerten und beherrschen. CONTROL schafft die Grundlage für sicheres autonomes Fahren in der offenen Welt.
Die Vielfalt und Dynamik offener Umgebungen überfordert klassische Absicherungsmethoden. CONTROL geht deshalb einen neuen Weg: Das System bewertet kontinuierlich, wie sicher es in einer Situation operieren kann, und reagiert bei Unsicherheiten mit vorsichtigen Maßnahmen, etwa durch angepasste Geschwindigkeit oder kontrolliertes Ausweichen.
CONTROL baut auf den Projekten PEGASUS und VVM auf, die systematisch Testfälle abgeleitet und komplexe Betriebsbereiche abgesichert haben. Als Teil der VDA Leitinitiative autonomes und vernetztes Fahren erweitert CONTROL diesen Pfad um die Fähigkeit, Unsicherheiten aktiv zu bewerten und zu bewältigen.
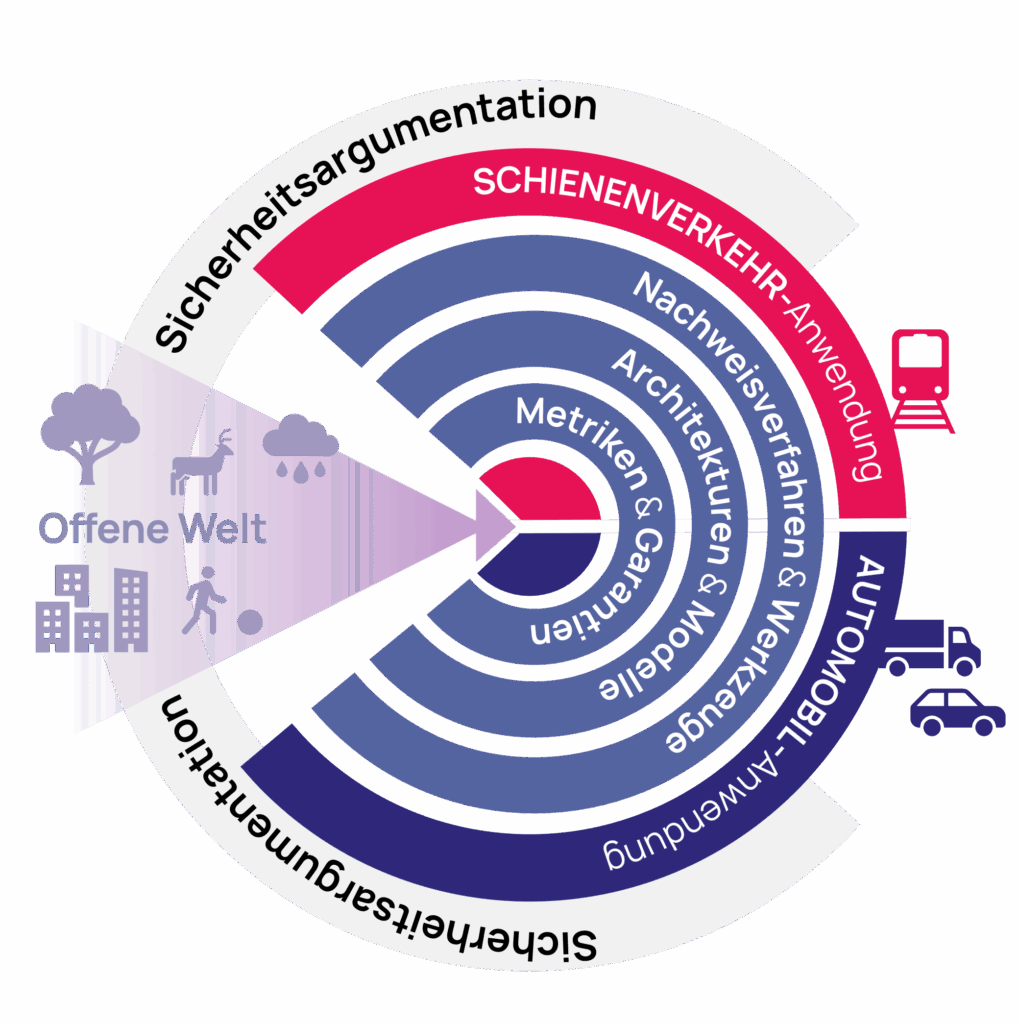
Statt einzelne Komponenten isoliert zu betrachten, wird das autonome Fahrzeug als Gesamtsystem verstanden, inklusive adaptiver Verfahren zur Bewertung von Unsicherheiten in der Entwicklungs- und Laufzeit. Ein zentrales Element ist die Entwicklung einer branchenübergreifenden Sicherheitsargumentation, die Unsicherheiten systematisch erfasst, bewertet und in die Architektur autonome Systeme integriert.
CONTROL wird ein Kernbaustein für das softwaredefinierte Fahrzeug (SDV) sein und schafft die Grundlage für schnellere Entwicklungen, Updates und eine höhere Innovationsgeschwindigkeit. Die entwickelten Metriken, Modelle und Werkzeuge sind skalierbar, domänenübergreifend und industriell umsetzbar, mit direkter Relevanz für Straße, Schiene und darüber hinaus.
Zwei Domänen – ein Thema: Durchgängige Metriken und Test werkzeuge
Impuls
Von der Forschung in die Praxis. Bei CONTROL kommen die entwickelten Werkzeuge zum Einsatz.
Die in CONTROL entwickelten Ansätze kommen auf Straße und Schiene real zur Anwendung. Die gesamte Wahrnehmungskette, von Sensorik über Datenverarbeitung bis zur Bewertung, wird als zusammenhängendes System betrachtet. Dabei werden Einflüsse wie Wetter, Umgebung oder technische Störungen modelliert und durch adaptive Verfahren berücksichtigt.
Die aus dem Projekt hervorgehenden Metriken, Modelle und Werkzeuge, darunter digitale Zwillinge und Unsicherheitsmodelle, unterstützen die Entwicklung, Bewertung und Absicherung autonomer Systeme. Sie bilden die Grundlage für eine branchenübergreifende Sicherheitsargumentation und werden in unterschiedlichen Umgebungen erprobt: in Simulationen am Rechner, in Laboraufbauten wie Testständen, sowie in Demonstratoren und Versuchsträgern, also Fahrzeugen, die reale Einsatzszenarien abbilden.
Durch robuste Systeme, beschleunigte Innovation und praxisnahe Sicherheit entsteht ein direkter Nutzen für Industrie, Forschung und Gesellschaft.
Zahlen & Fakten
Konsortialleitung:
Dr. Cornel Klein | Siemens Dr. Sanwardhini Pantawane | Valeo
Konsortium:
24 Partner: OEMs, Zulieferer für den Straßen- und Schienenbereich, Technologiepartner, Forschungseinrichtungen